



I am building a 2 axis robotic plankton feeder. Basically, I have six clear plastic tubes that are sitting in a row. These towers are 6 inches in diameter and they are a little over 6 feet tall. I designed a carriage that slides along a rail with feeding tubes attached to it. The second axis moves the 1/4 inch feeding tubes down into the tower for dispensation and back up again before moving on to the next tower.
A problem that I have is that when I turn of the power to the motor, the extender falls down into the tube because there is very little friction on the slide. The aluminum slide is about 16 inches long and has a plastic gear rack attached to it. The bracket and clips for the ¼ inch feeding tube(s) weigh almost nothing.
(This rack and pinion extender is mounted vertically)
Should I add some Teflon with a spring behind it for a friction stop or something else? I could get some of it (perhaps in a dowel shape) and put it in a tube with the spring and attach that to the carriage.
Another thing that I could do is to try to find a solenoid type brake. Since I have an Arduino controller, it would just require a few extra lines of code. The down side is that I would have to add a couple more wires that go to the carriage. I was hoping to limit it to two wires. That makes it easier to run without e-chain.
Can you think of anything that would work better?
Thread: I need a brake.
Results 1 to 10 of 10
-
07-04-2011, 12:52 AM #1
 Registered
Registered
- Join Date
- Apr 2011
- Posts
- 73
I need a brake.
-
07-09-2011, 01:43 AM #2
Registered
- Join Date
- Oct 2005
- Posts
- 2392
Interesting project!

My preference would be for a geared motor, that will resist being backdriven.
But if you are already committed to that motor and setup then you could easily add a solenoid and rubber foot, or since it will be wet and slimy... maybe a solenoid with some mechanical grip like teeth that will work just as well wet or dry...
-
07-10-2011, 01:12 AM #3
Registered
- Join Date
- Apr 2011
- Posts
- 73
I first bought a small geared motor but it was way too slow. It was one of these:
5V stepper motor + stepper motor driver board
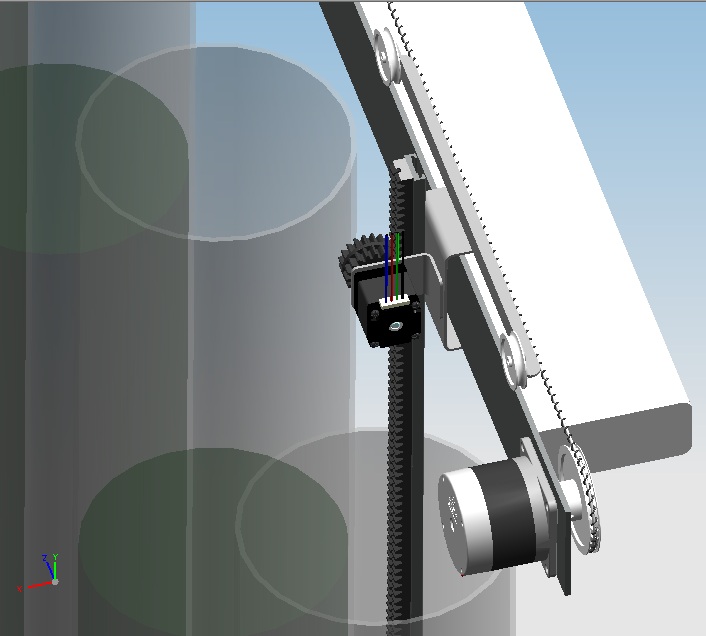
Then I bought the one that you see in my rendering. It is this one:
Pololu - Stepper Motor: Bipolar, 200 Steps/Rev, 28x32mm, 3.8V, 670mA
Could you suggest something that is close to a comparable size and weight but has pretty good speed? The slide is about 16 inches long.
-
07-11-2011, 12:11 AM #4
Registered
- Join Date
- Oct 2005
- Posts
- 2392
How fast does it need to be?
Assuming once it has operated on all of your 6 tubes, it moves to a home position? Then maybe you can keep the stepper motor powered up until it gets to the home position (away from the 6 tubes) and have a mechanical stop it rests on, so no brake is needed.
Since you already have the motor and gears etc setup and working it's probably best to explore simple solutions now before buying a whole new gearmotor.
-
07-11-2011, 03:04 AM #5
Registered
- Join Date
- Apr 2011
- Posts
- 73
Please forgive the rambling nature of this response. I wrote as I brain stormed (while watching TV).
I had problems with heat build up so I put in a motor cut offs right after use. I guess that I can change up the timing.
Maybe I can turn it off when the slide is in the down position. The time between tubes should be short so I can turn it on long enough to lift up, move to the next station, extend back down and then turn off again. I can dispense the food and water while the motor is off and then wait several minutes before retracting and moving to the next station.
I would have to add a stop at the bottom of travel. I guess that I can just turn off the motor to let the carriage fall to the stop. I have an optical limit switch to insure that it is up when the carriage moves to the next station. Instead, I could program in an over travel distance and use the limit switch to stop the motor at the top so I don't have to worry about calibration. I could leave it on while going home and let it fall between cycles.
I want to start a cycle every hour so I want to lengthen the cycle to close to an hour, pausing 5-8 minute at each station.
Well, I guess that's it. what do you guys thing?
-
07-12-2011, 12:03 AM #6
Registered
- Join Date
- Oct 2005
- Posts
- 2392
Hmm, well the stepper motor should be rated to be permanently turned on, and it will get "hot" to maybe 50'C but that is fine.
It's up to you where you pause the machine, but I think it would be more "typical" to pause it with the mechanism up out of the water.
Like I said you could put a mechanical support between the tubes, so the mech could be positioned between the tubes then the motor turned off, so it lowers only a tiny bit to sit on that support. Or that support could be at the home position.
It just seems more professional to pause the mechanism out of the water, so it can be cleaned/inspected/adjusted etc. To my mind it should only be in the water when absolutely necessary.
-
07-12-2011, 12:48 AM #7
Registered
- Join Date
- May 2007
- Posts
- 767
Three alternatives to RomanLini's suggestions using your existing rack and motor drive.. 1. Arrange for the windings to become short circuited as the power is cut off. This will effectively lock the rotor of the stepper motor. Just make sure you don't short circuit the driver 2. Arrange for a ratchet that is disengaged by either another stepper motor or a simple solenoid when the rack is to be released. I think a ratchet would be better than a stop as release could be synchronised with raising the rack which would prevent the ratchet release having to supply much power and also prevent any tendency to dig in or drop if not perfectly synchronised. 3. Arrange a catch that is operated by a trip on the rack and is released by further retraction past a set point but can not re-engage until the rack has been lowered beyond the trip point.
Regards - Pat
PS Just remembered! If the plankton have been fed why not leave the basket in the last tube or arrange the cycle to step and repeat in six equal time intervals? Also why not use the fully down to trigger the other actions using levers to control the valves. I have seen a similar dosing device that injected air to stir up the mix when the dose of in your case nutrients had been delivered. The air valves were operated by the slide that did the dipping along with taking measurements of the solutions properties.
A simple sheet of flexible material (plastic would be rust free) to support the wires makes a very good substitute for the 'E Chain' cable duct. Simply tie the wires to the plastic strip which would be about 1.5 times the length of travel to give a nice bending action over the total traverse.
-
07-12-2011, 05:09 AM #8
Registered
- Join Date
- Apr 2011
- Posts
- 73
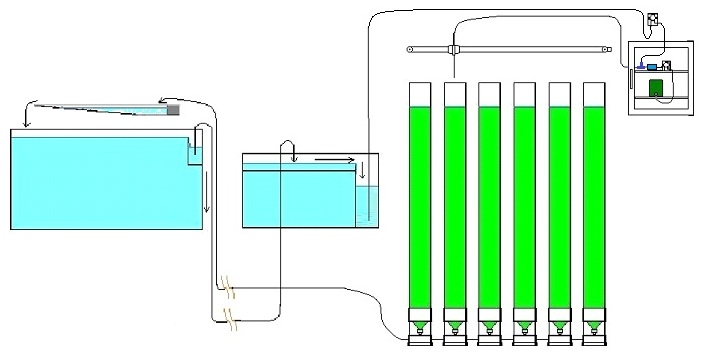
(The liquid food in in a mini fridge on the far right.)
On a previous project, I use a four wire cord with a round cross section. I held it between the main aluminum rail and a smooth plastic wall. It rolled out very nicely but I like the E-Chain substitute idea as well. Shorting out the motor is way over my head.
This is some pseudo code:
Wake up of the hour
After running calibration routine
Main and extender motors on
Raise slide
Move to station
Motors off (slide falls)
Dispense food
Dispense water
Wait
Motor on
Raise slide
Turn off motor when sensor is blocked
If blocked, move to next station
Repeat until finishing last station
Go home
Motors off (just under an hour)
Wait for next clock cycle
-
02-08-2012, 10:35 AM #9
Registered
- Join Date
- Feb 2012
- Posts
- 0
OMFG
i tought it was hobby discussion
you have pretty mind blowing hobby i say ;Dflac to mp3 http://freeflactomp3converter.com/
-
02-08-2012, 07:31 PM #10
Registered
- Join Date
- Apr 2011
- Posts
- 73

I have been so busy that i haven't been able to work on it much but I finally got the robot up on the wall. Now it is time to start finally assembly so I should have it running sometime between two weeks and 6 months from now.
These are links to my progress so far.
[ame=http://www.youtube.com/watch?v=zBPnccwZjO4]VideoOfBenchWork.MOV - YouTube[/ame]
Information about the program code. (This one is a reprint from earlier in the thread.)
[ame=http://www.youtube.com/watch?v=VMpPz_xaEC0]P9110046 - YouTube[/ame]
This is how the first axis works. The aluminum rail is attached to a 2 by 4. It would be attached to the wall. In this video, it is siding on it's side.
[ame=http://www.youtube.com/watch?v=dK4hXVRhH2k]000 1969 - YouTube[/ame]
This is how the second axis works.
 I just got my e-chain off of a slow boat from China but it was comparatively cheap.
I just got my e-chain off of a slow boat from China but it was comparatively cheap.
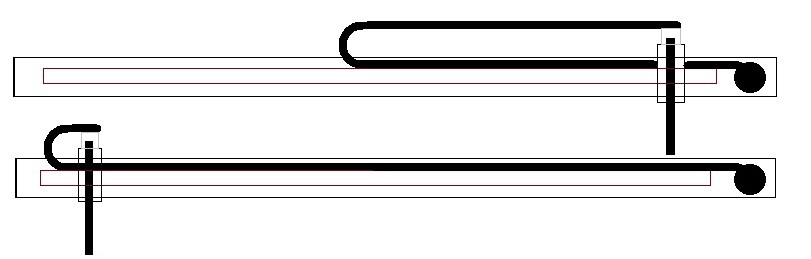
This is the plan for controlling the wires with the new e-chain. I really only needed about 5 feet but I had to by 2, four foot lengths.


 Reply With Quote
Reply With QuoteSimilar Threads
-
600mm Box bend brake (Finger Brake, pan Brake)
By RotarySMP in forum Bending, Forging, Extrusion...Replies: 35Last Post: 11-01-2015, 10:24 AM -
Looking to buy Used Press Brake
By magma-joe in forum Bending, Forging, Extrusion...Replies: 5Last Post: 01-16-2012, 09:05 PM -
brake
By rotsenmendoza in forum Mach Software (ArtSoft software)Replies: 1Last Post: 04-15-2011, 11:39 PM -
Need a box and pan brake
By J-Mccoin 2009 in forum Want To Buy...Need help!Replies: 0Last Post: 12-11-2009, 10:10 PM
