



Hi,
I am new to CNC zone and am very interested in Kflop board, I want to know why KFLOP using DSP and FPGA both?
what are the individual task for the DSP and FPGA?
Is there any advantages by using both DSP & FPGA together?
Which one is the G-code Interpreter DSP or FPGA?
Because some boards are using FPGA with microcontroller and in some CNC machines they are using PLC boards. What is the difference of these combinations?
Thanks in Advance.
Regards,
Naveen K
Results 1 to 4 of 4
-
06-14-2018, 02:59 PM #1

- Join Date
- Jun 2018
- Posts
- 2
Why Kflop using DSP and FPGA Both? What is the purpose of use? Any advantages?
-
06-14-2018, 06:05 PM #2
 Junior Member
Junior Member
- Join Date
- May 2006
- Posts
- 4045
Re: Why Kflop using DSP and FPGA Both? What is the purpose of use? Any advantages?
Hi Naveen,
A DSP is optimized for high-speed, numerical, real-time computations. KFLOP's DSP is rated for a peak 1.2 GFLOPs (Billion Floating Point Operations per second). A DSP can also perform operations like a standard CPU or Microprocessor. The DSP performs serial tasks on microsecond time scales such as PID servo calculations and trajectory generation.
An FPGA is a massively parallel programmable low-level logic device. KFLOP's FPGA is rated as 100,000 logic gates. It can be configured to perform simple tasks like Step Pulse Generation or Encoder Quadrature Counting at rates that a processor could never achieve. Also unlike a processor, which basically executes in a serial manner, the operations performed by an FPGA operate concurrently in parallel. An FPGA can perform tasks on a nanosecond time scale.
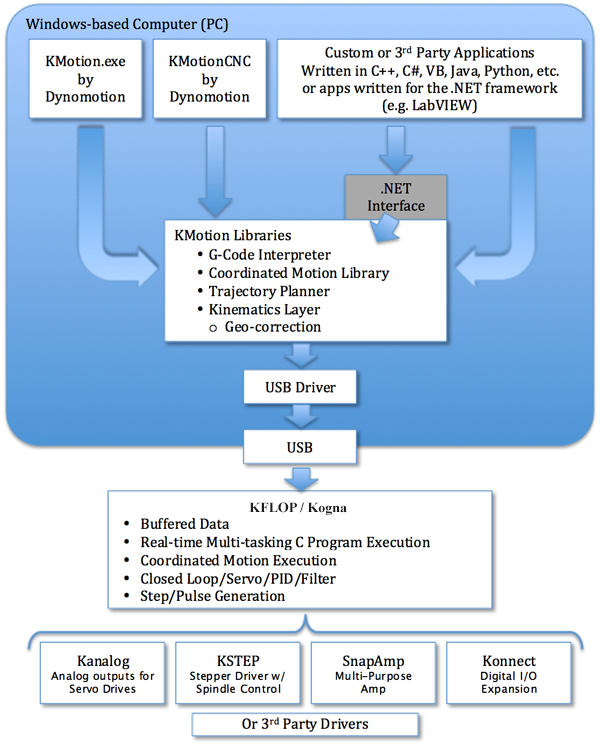
Although KFLOP has some stand-alone capability, the KMotion Architecture is designed to work with a PC. A PC adds almost unlimited resources of Virtual Memory, Disk, Networking, Display, Graphics, Keyboard, Powerful Development Tools, etc.- but is not real-time and operates on millisecond - to second - time scales . So in the KMotion Architecture operations that do not absolutely need to be performed real-time, are more easily handled in the PC. These include the GCode Interpreter, Trajectory Planning, Kinematics, GUI, etc... See:
HTH
RegardsTK
http://dynomotion.com
-
06-15-2018, 03:44 PM #3
- Join Date
- Jun 2018
- Posts
- 2
Re: Why Kflop using DSP and FPGA Both? What is the purpose of use? Any advantages?
Hi Tom kerekes,
Thanks for the information and appreciate your support.
PID servo calculations and trajectory generation should be based on the G-code right? If not, what are PID & trajectory generation?
As you mentioned, Gcode interpreter operation will be happens in Kmotion (in PC only) and its send the axes commands to the Kflop directly right? Then really DSP required?
I thought DSP receives the G-codes and interprets and give the commands to the motor drivers.
Why you rae using 2 kind( NOR & RAM) of memory ? Is there any features like “ save the current job status when power failure”?
Regards,
Naveen
-
06-16-2018, 05:33 PM #4
Junior Member
- Join Date
- May 2006
- Posts
- 4045
Re: Why Kflop using DSP and FPGA Both? What is the purpose of use? Any advantages?
Hi Naveen,
PID is Proportional, Integral, Derivative feedback control. Completely different from GCode.PID servo calculations and trajectory generation should be based on the G-code right? If not, what are PID & trajectory generation?
Trajectory generation is real-time, point-by-point, linear and circular interpolation unlike GCode which basically just instructs where to go.
yes. How else would the motion actually be created or many other controller functions be performed?As you mentioned, Gcode interpreter operation will be happens in Kmotion (in PC only) and its send the axes commands to the Kflop directly right? Then really DSP required?
No. Some simple controllers work this way. But usually with very basic functionality and trajectory planning.I thought DSP receives the G-codes and interprets and give the commands to the motor drivers.
After a power loss it is usually too late to save anything. KFLOP Firmware is stored in Flash. User Programs and User Data can also be Flashed. Usually a PC is available so User configurations, Programs, and Data are better stored there.Why you rae using 2 kind( NOR & RAM) of memory ? Is there any features like “ save the current job status when power failure”?
RegardsTK
http://dynomotion.com

 Reply With Quote
Reply With QuoteSimilar Threads
-
FPGA based cnc controller / routing pcb
By guru_florida in forum CNC Machine Related ElectronicsReplies: 10Last Post: 04-30-2013, 10:47 AM -
NEW PRODUCT RELEASE: 5I25 PCI “Anything I/O FPGA Card
By mesanet in forum News AnnouncementsReplies: 2Last Post: 02-08-2012, 12:40 AM -
building FPGA motion controller
By Episs in forum CNC Machine Related ElectronicsReplies: 89Last Post: 04-11-2011, 11:56 AM -
checksum error in FPGA
By japco43 in forum DNC Problems and SolutionsReplies: 2Last Post: 11-13-2007, 05:59 PM
