

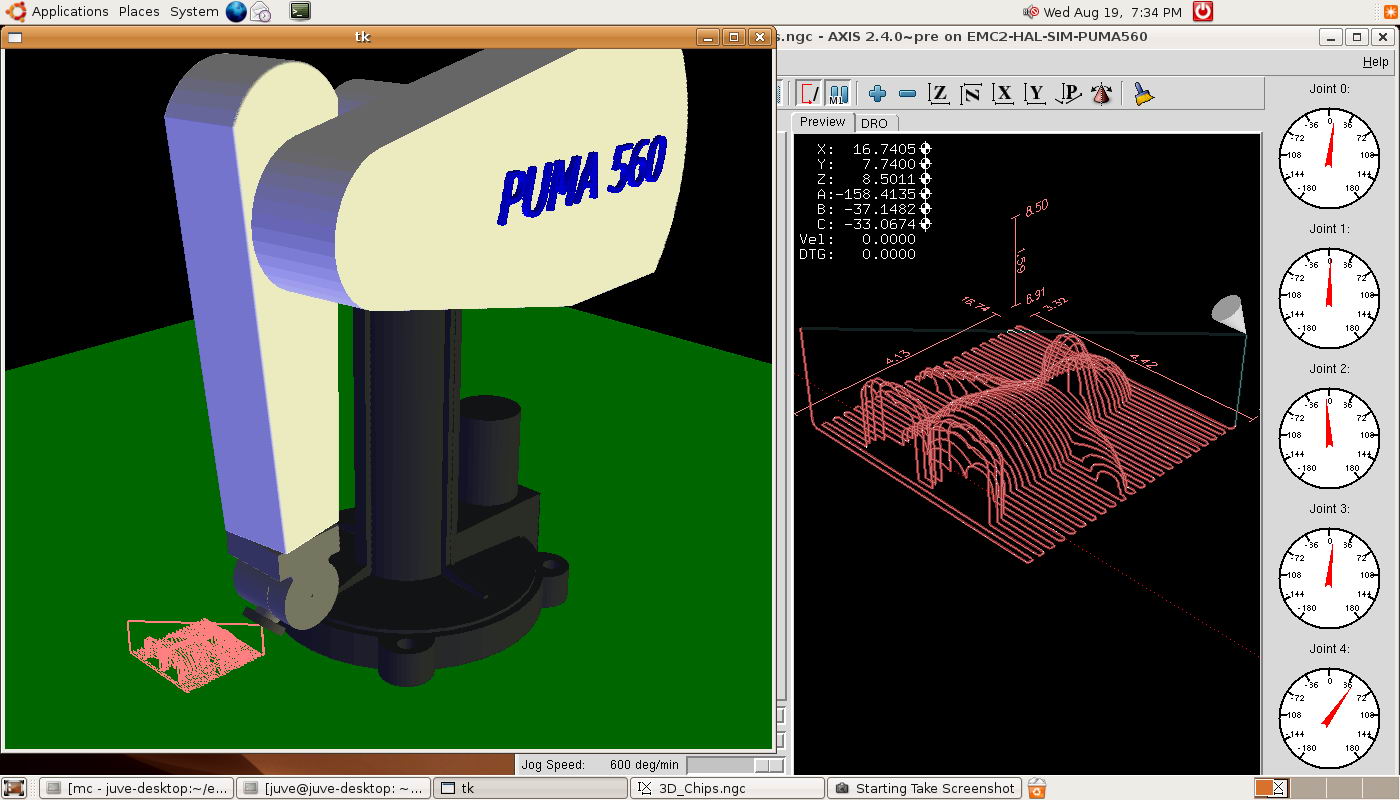
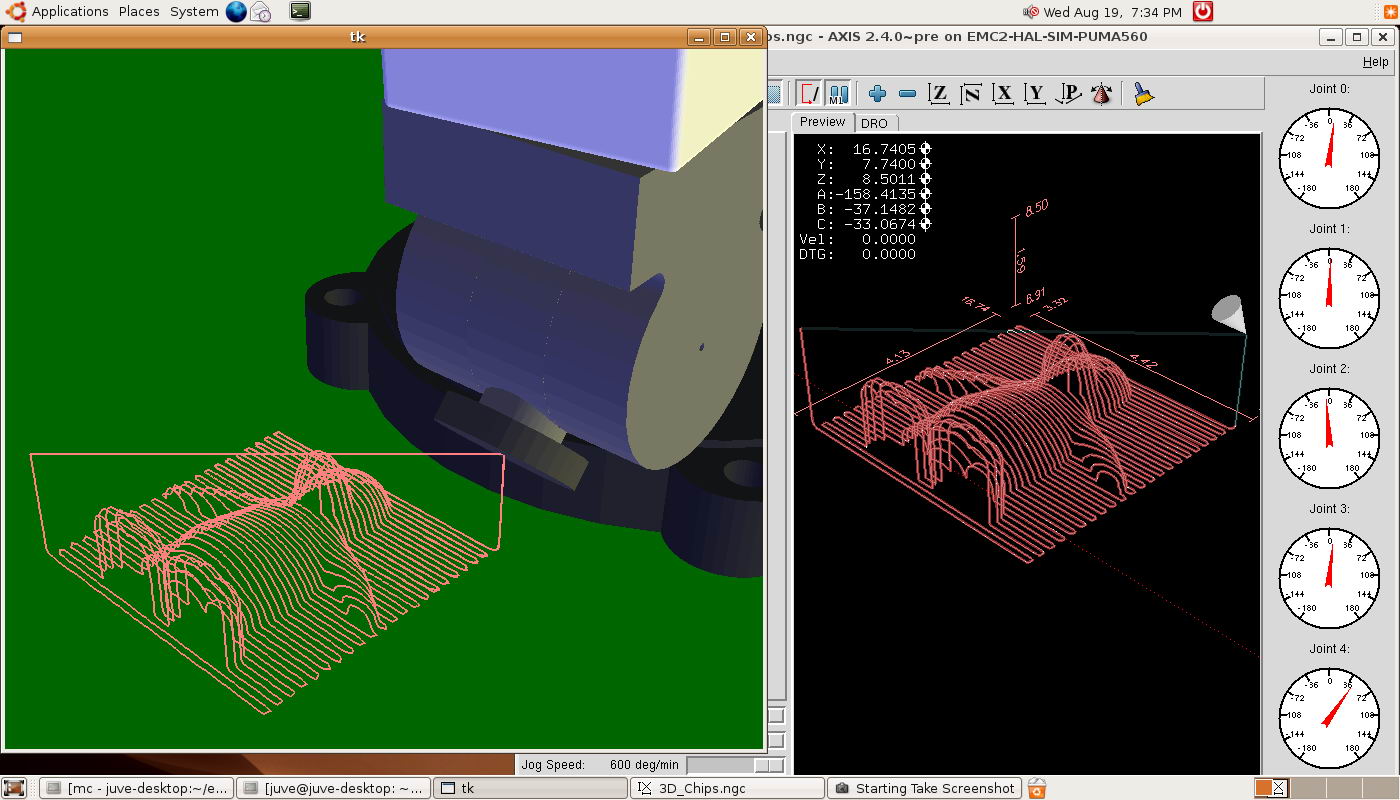
EMC2 has a modeling 'script' that allows you to model your machine.
Here is a simple example. (well not that simple - but gets the point across)
you can read about it here.
http://emergent.unpy.net/01196094602
[ame="http://www.youtube.com/watch?v=fWKYQUj5AOs"]YouTube - EMC2 5-axis machining[/ame]
a bit of history
http://jmkasunich.com/cgi-bin/blosxo...-02-04-07.html
http://emergent.unpy.net/01170621073
http://emergent.unpy.net/01170693566
One of the developers lately has been playing with generic serial kins for robot arms. Uses forward and inverse kins that allows for world movements (xyzabc)
You can read about it here..
http://juve.ro/blog/puma
(yes I am the samco - and no - I have not had time to convert the arm yet.)
This is a puma 560 arm. Alex drew the arm parts up in alibre and was able to use them in the vismach model. I think the simulation looks awesome!
Results 1 to 11 of 11
-
08-25-2009, 07:42 PM #1
 Registered
Registered
- Join Date
- Jul 2003
- Posts
- 1766
EMC2 Machine modeling / New simulation - robot arm kins.
-
08-25-2009, 11:07 PM #2
Community Moderator


- Join Date
- Mar 2004
- Posts
- 1661
This is odd, I asked a question about robot kinetics a week ago at the EMC mailing list and didn't get a single answer.
I'm glad to see some robot work anyway.
-
11-22-2011, 08:53 AM #3
Registered
- Join Date
- Nov 2006
- Posts
- 22
 PUMA 560
PUMA 560
Sorry for being a newbe with EMC2... but I just loaded Ubuntu and EMC2 onto a machine... I was thrilled to discover there was a PUMA 560 as I have a working one sitting about 6 feet away.
I would like to know the steps that I need to take to get the visual simulation up and running so I can experiment with it and get comfortable driving the virtual machine around.
Once I have achieved that... I need to know if you are using a serial cable to communicate with VAL on the controller... or if you built your own controller with something like a set of Geckodrives or similar. I have a second PUMA arm that has no controller... and I would love to get them both running.
Thanks in advance,
Jerry
-
11-22-2011, 09:16 AM #4
Community Moderator
- Join Date
- Mar 2004
- Posts
- 1661
With Step/Dir configuration you can drive your Puma with any stepper drives, it's just a matter of getting or making a breakout board with enough break outs to drive all joints. But a Puma is not more than four joints right? Then most breakouts would do.
-
11-22-2011, 09:26 AM #5
Registered
- Join Date
- Nov 2006
- Posts
- 22
First, the PUMA uses DC servo motors with quadrature encoders... so then if you wanted to replace the existing VAL controller, you would need to install the proper drivers.
The PUMA 560 is a 6 degree of freedom robot, 6 joints not 4. (Plus a signal to open/close the gripper)
In G-Code it is the following... X/Y/Z/A/B/C
In VAL the joints are 1=X / 2=Y / 3=Z / 4=O / 5=A / 6=T
-
11-22-2011, 09:45 AM #6
Community Moderator
- Join Date
- Mar 2004
- Posts
- 1661
Still not a problem, you just need to break out enough, you need two parallel ports to handle all the degrees. As long as you don't have a double closed loop you will still run the servos with a step/dir config. Originally Posted by askjerry
Originally Posted by askjerry

Any servo step/dir drives will work.
-
11-22-2011, 03:10 PM #7
Registered
- Join Date
- Nov 2006
- Posts
- 22
I guess you are using the term "breakout board" to mean "external motor driver", so you are NOT using the VAL system controller.
I am aware that I could purchase 6 of the Gecko drives which read quadrature sensors and drive them via the parallel port. An alternate option is to purchase a PCI 32 I/O board such as 32-bit Multi I/O PCI Express Controller Card PIOP9865-1P - DinoDirect.com for example. (I have seen these cards range from $20 to $500 ) I think the one I used for my CNC milling machine was $50 at the time, it gave me 64 programmable I/O bits that I set up as 32 Inputs and 32 outputs.
By doing that, I had enough inputs for other things like additional limit switches, start and stop lines for coolant, vacuum, etc.
I was wondering if someone had come up with a way to operate the PUMA via the serial port... because the 6 Gecko Drives are $121 each, so that's $726.00 USD total that would be needed to interface the unit in addition to the I/O cards.
Not having an extra $800 laying around... looks like I'll be doing manual control for a bit.
I would like to know how to get the 3D simulator up and running so that I can at least play with that on screen. RE: Puma 560 3D model
Thanks,
Jerry
-
11-22-2011, 04:37 PM #8
Registered
- Join Date
- Jul 2003
- Posts
- 1766
I have a puma arm without any of the control.. I am going to drive them with analog amc servo drives and mesa hardware.
What do the drives that came with the arm take? Mesa has some really inexpensive interface cards. $80ish gets you 48 i/o and $200 gets you 72i/o. This gives you hardware encoder counters and hardware pwm/step generation. They also have many daughter boards that do things like convert the pwm to +/-10v. They are coming out with a lot of options it seems so - take a look.
Mesa Electronics
That is the direction I would go. (maybe you can use the drives that came with the arm)
ask lots of questions and do a lot of research
(I am using 2 5i20 mesa cards for my Kearney and trecker mill - for my setup that gives me 10 +/-10v channels and encoder counter interfaces plus 96 i/o. It has been performing flawlessly for months now.) You can see random videos here.
samcoinc's Channel - YouTube
emc is one awesome piece of software that keeps getting better.
sam
-
11-22-2011, 04:55 PM #9
Registered
- Join Date
- Nov 2006
- Posts
- 22
I have the same controller as Bryann does in this web page.
Brynn's Puma 560
I'm going to look into possibly building a driver eventually as I do have a second PUMA. (Got confirmation that my friend Mike in St Louis no longer wants his PUMA as the controller processor board is damaged.)
It may be possible to make a card that plugs into the slot of the old processor and sends the drive signals... but I have a 2-inch thick book of schematics to go through to determine if that's possible. May be better to start fresh, get the pin-out of the robot arm and see if I can find one of those connectors... then build my own control box and interface to EMC2.
Huge project... but well worth it if I can do it. Likely I'll save up my money and get an off-the-shelf driver. I'll look at the links you sent and read a bit more.
Thanks,
Jerry
-
11-23-2011, 12:11 AM #10
Community Moderator
- Join Date
- Mar 2004
- Posts
- 1661
Well, you wrote you had a robot without a controller so yes I'm talking about a robot without the VAL. You'll never find a CNC'ish software that communicates with the serial port, way too slow. Originally Posted by askjerry
There are other drives as well. I'm using CNCDrive's 08020 and they are marvelous. Still around 100 bucks though. If you really want to go the cheap way you have the UHU-option. i know a few good working machines driven with home built drives. UHU Servo
-
11-23-2011, 12:34 AM #11
Registered
- Join Date
- Nov 2006
- Posts
- 22
I'll have to look into the UHU much closer... I have a rail of 25 of the 2313 chips here... it will be interesting to see his circuit and method.
If he has it reading the quadrature encoder, doing the motor driver signals, and taking the STEP/DIRECTION signals it would be well worth getting 6 and making a setup. I can hardly wait to get the other PUMA here!
Meanwhile... anyone know how to run the 3D simulator from EMC2?
...I'll go play around to night and see if I can figure it out on my own. This should make a great training tool before I turn someone loose with a teach pendant and a 2 meter robot.
Thanks,
Jerry

 Reply With Quote
Reply With QuoteSimilar Threads
-
SolidCam Machine Simulation
By carbide_burner in forum SolidCAM for SolidWorks and SolidCAM for InventorReplies: 3Last Post: 04-13-2016, 06:34 AM -
student needs help on defining a machine in simulation
By veteq in forum SolidCAM for SolidWorks and SolidCAM for InventorReplies: 0Last Post: 03-16-2009, 10:05 PM -
EMC2 + Gecko 540 - 6-8 axis robot
By avongil in forum LinuxCNC (formerly EMC2)Replies: 10Last Post: 12-01-2008, 03:39 AM -
FeatureCAM Expands Product Offering with Machine Simulation
By cncadmin in forum News AnnouncementsReplies: 0Last Post: 01-22-2005, 01:58 AM -
CNC robot machine
By cncadmin in forum CNC Machining CentersReplies: 0Last Post: 08-10-2003, 03:49 AM
