



I'm using stepper motors on my CNC and for the acceleration ramp I just want to start the motor at a certain speed and then with each step slightly decrease the "delay" between step pulses (so I'm trying to just make a simple kind of linear acceleration ramp). But I don't know what speed I can start the motor at without it losing steps?
This is the motor I'm using (the datasheets are on the page as well): Item # PK266-02A, Stepping Motor on Oriental Motor U.S.A. Corp.
I appreciate any advice you might be able to give me!
Thanks!
Results 1 to 3 of 3
-
12-05-2010, 03:23 AM #1
 Registered
Registered
- Join Date
- Jan 2009
- Posts
- 55
How quickly can a stepper motor be started without losing steps?
My hobby website: www.roboticsguy.com
-
12-05-2010, 04:36 AM #2
Registered
- Join Date
- Nov 2004
- Posts
- 260
To calibrate your settings you will have to find the maximum values that can be used with your setup. Originally Posted by Robotics Guy
Originally Posted by Robotics Guy

Start with a low Startvalue and very slow acceleration then observe the motor by programming a move of a few inches travel.
If the motor starts smoothly then slowly accellerates to speed you got good values to start further tests.
If you get a quick jerky start you need to reduce the startup value.
If it starts extreamly slow you increase the value.
Observe acceleration programmed Feedrate should be reached within a few seconds.
If the accel. is very fast increase the value, if too slow decrease.
When good starting values are found, setup a Dial indicator and run it against a solid stop, set the indicator to zero.
Now edit a small program that will back off the indicator a few inches then drive it back to the same Position previusly Zero'd.
You now have a test program that lets you test if you are loosing any steps durring execution of your program.
Run this a few times verifying that it positions back to zero.
Now increase your Startvalue untill the highest number that dose not loose steps is found. Then do the same with the accel. values.
When both values are found reduce them by 15%-20% for reliability under load.
Retest this again the next morning when the Machine is cooled of and oil condition is adverse to ensure reliability.
May even add some weigth to the table to simulate working conditions.
Good Luck
-
12-07-2010, 03:12 AM #3
Registered
- Join Date
- Jan 2009
- Posts
- 55
Thanks a lot for your help!
So the only way to determine the appropriate motor starting/stopping speed and acceleration ramp is through trial and error? My concern with this approach is that my machine is 4000 steps per inch, so it may be difficult or even impossible to tell if a low number of steps are being lost.
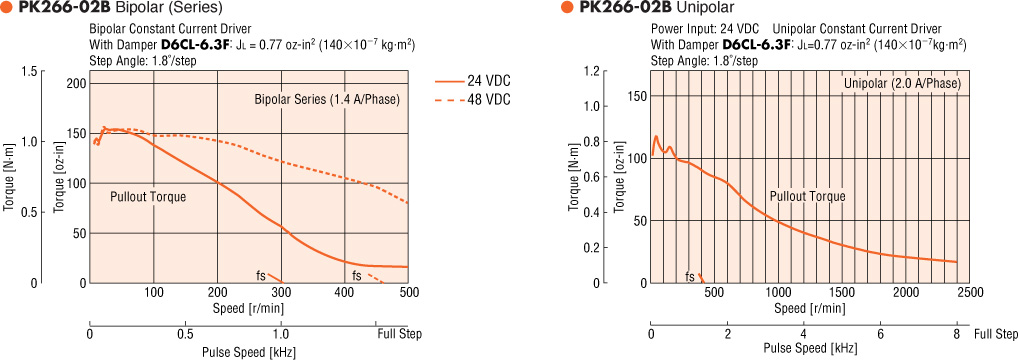
The image below is from the page I linked to in my previous post; it shows the speed/torque characteristics of my motor, which I'm running bipolar at 36V.
Is it normal for a stepper motor to vibrate a lot at lower speeds?
And would anyone have any idea why the motor jerks back and forth uncontrollably between 40rpm to 54rpm? (on either side of that range, higher or lower, it runs fine). Is that the "resonant frequency" that I keep reading about?
Appreciate all your help My hobby website: www.roboticsguy.com
My hobby website: www.roboticsguy.com

 Reply With Quote
Reply With QuoteSimilar Threads
-
Please Help with CNC losing steps
By mendez in forum DIY CNC Router Table MachinesReplies: 2Last Post: 03-06-2010, 09:04 AM -
Losing steps
By tjs88yj in forum Viper Servo drivesReplies: 11Last Post: 02-25-2010, 12:31 AM -
Losing steps?? How do I know??
By JeLC in forum DIY CNC Router Table MachinesReplies: 28Last Post: 09-09-2009, 12:26 PM -
Losing Stepper Steps Help Needed
By halmande in forum DNC Problems and SolutionsReplies: 1Last Post: 02-12-2007, 12:56 AM -
Losing X steps, stepper to small??
By matth in forum DIY CNC Router Table MachinesReplies: 20Last Post: 09-06-2006, 06:48 AM
